La protezione sismica in italia
Nell’ultimo decennio la ricerca di strategie “non convenzionali” di protezione sismica ha fatto registrare straordinari avanzamenti, tanto da offuscare il senso attuale del cosiddetto metodo di progettazione “convenzionale”. Sono ormai numerose le installazioni di dispositivi di dissipazione supplementare di energia nel mondo, particolarmente concentrate in nord America. Approccio oramai consolidato è quello che concentra l’attenzione della progettazione antisismica, non tanto sulla definizione delle proprietà di resistenza dei singoli elementi strutturali, quanto sulla filosofia del “Capacity Design” ovvero sullo studio della gerarchia delle resistenze e delle caratteristiche di duttilità. Secondo tale procedimento si perviene all’individuazione di zone a “danneggiabilità controllata” nelle quali concentrare la dissipazione, in modo da salvaguardare gli elementi strutturali principali. Tali zone possono essere facilmente identificate conducendo sulla struttura una analisi dinamica incrementale (I.D.A.) oppure mediante l’oramai più consolidata analisi Pushover (definita come statica non lineare nella OPCM 3274/03). Questa modalità di progettazione, tuttavia, non sempre risulta economicamente conveniente, richiedendo necessariamente interventi di riparazione dei danni prodotti dal sisma. Per ovviare a tale inconveniente, sono stati sviluppati nel corso di questi ultimi anni, numerosi dispositivi di dissipazione supplementare di energia o di isolamento, il cui inserimento nella compagine strutturale è stato finalizzato alla massima limitazione della danneggiabilità degli elementi strutturali, dal momento che in essi s’intende concentrare la gran parte dei meccanismi di dissipazione. Questi stessi dispositivi possono essere montati anche su strutture esistenti, consentendo un adeguamento oppure un miglioramento sismico della struttura. Particolarmente utilizzati nei ponti di nuova concezione, i dispositivi di isolamento o di dissipazione si aprono all’impiego di protezione di strutture civili di particolare pregio o importanza ai fini della protezione civile, anche in Italia. Un passo importante, anche se non esaustivo, viene compiuto da un punto di vista normativo, infatti, per la prima volta vengono date disposizioni normative (cap.10 – OPCM3274/03), sugli edifici isolati alla base. Tali indicazioni, se pur non modificando sostanzialmente quelle presenti nelle linee guida, emanate attraverso la circolare 256/96 dal Ministero dei LL.PP., rappresentano un passo importante verso la regolamentazione, con relativo snellimento delle procedure di controllo e approvazione, di tecniche di protezione sismica. L’attenzione sempre crescente verso queste metodologie di protezione, ha prodotto l’inevitabile entrata nel mercato di numerosi dispositivi. La classificazione di questi dispositivi è resa complessa data la duplice natura degli stessi, ma viene riportata una comune suddivisione (Tabella 1 ).
| Classificazione | principi | materiali | risultato |
|---|---|---|---|
| dispositivi isteretici | Snervamento materiale
Attrito |
Acciaio
Contatto |
Dissipazione energia, miglioramento della resistenza e rigidezza |
| Dispositivi viscoelastici | Deformazione di solidi viscoelastici
Deformazione di fluido viscoelastici |
Polimeri viscoelastici
Fluido altamente viscosi |
Dissipazione di energia, notevole accrescimento della rigidezza, assorbimento di urti |
| Dispositivi ricentranti | Fluidi in pressione
Friction Spring Dampers Metalli a memoria di forma |
Olio, silicone
Contatto metallo/metallo Leghe a memoria di forma, comportamento superelastico |
Dissipazione di energia, leggero aumento di rigidezza, capacità di ricentraggio |
Tabella 1: classificazione dispositivi di protezione sismica
Nel presente articolo, è stato mantenuto volutamente congiunto l’utilizzo di questi dispositivi ai fini dell’isolamento e della dissipazione, lo scopo infatti è quello di illustrarne le tecniche di modellazione e di analisi.
Modellazione di dispositivi di dissipazione
Nel codice di calcolo SAP2000 (CSi – Computers and Structures inc.) le proprietà inelastiche vengono inserite mediante elementi non lineari a uno o a due nodi chiamati NLLINK (Non Linear Link). Gli NLLINK possono essere definiti indipendentemente nei sei gradi di libertà. Gli NLLINK sono così suddivisi:
o Damper: smorzamento viscoso
o Gap: apertura/giunto resistente a sola compressione
o Hook: gancio con apertura resistente a sola trazione
o Multilineare elastico: legge multi-lineare elastica monoassiale
o Multilineare plastico: legge elastoplastica monoassiale (modello secondo Wen oppure con incrudimento cinematico)
o Isolatore ad attrito (Friction-pendulum base isolator) che può essere usato come un appoggio mono-direzionale ad attrito
o Isolatore plastico bi-assiale (esempio di isolatore in gomma).
Di seguito verranno illustrate le modellazioni degli elementi base. I dispositivi in commercio associano più comportamenti, per esempio uniscono le proprietà isteretiche dell’acciaio a quelle di un fluido viscoso, combinandole in serie o in parallelo per dotare i dispositivi delle caratteristiche di modesta resistenza a basse velocità (evitando così coazioni termiche) e di alta dissipazione durante gli shock sismici. Per riprodurre informa numerica questi comportamenti sarà quindi sufficiente unire diversi elementi base.
Proprietà di un elemento damper
Il modello di smorzamento viscoso è basato sul modello viscoelastico di Maxwell (Malvern, 1969) è costituito da uno smorzatore a viscosità non lineare in serie con una molla. Si veda la Figura 1 .
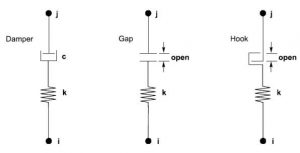
Figura 1: Damper, Gap, Hook
La legge non lineare di forza-deformazione è dato da:
[1]![]()
dove K è la costante elastica della molla, la c è il coefficiente di smorzamento, cexp è l’esponente della velocità, il dk è la deformazione subita dalla molla elastica e la sua derivata prima è la velocità di deformazione.
La gamma pratica è fra 0.15 e 2.0, anche se difficilmente si supera 0.3. La deformazione totale dell’elemento risulterà pertanto somma della deformazione della componente elastica e di quella viscosa.
[2]![]()
Per uno smorzatore puro l’effetto della molla può essere reso trascurabile rendendolo sufficiente rigido.
La rigidezza della componente elastica deve essere grande abbastanza da far risultare il periodo caratteristico del sistema molla-smorzatore dato da (quando l’esponente è 1) un ordine di grandezza minore della grandezza dei passi di carico. Il passo di carico rappresenta l’intervallo di tempo nel quale il valore del carico cambia.
Proprietà di elementi Gap e Hook
Elementi elastici non lineari dotati di una apertura posta in serie ad una molla. L’elemento Gap è dotato di sola resistenza a compressione, può essere utilizzato per simulare dei battimenti strutturali, per esempio dovuti alla chiusura di un giunto, oppure, nello specifico per simulare il fondo corsa di un dispositivo. L’elemento Hook è il suo duale, ovvero, capace i resistere solo a trazione. Si veda la Figura 1 .
Proprietà di un elemento multilineare elastico
La relazione Forza-Deformazione è data da una curva n-lineare elastica. La curva n-lineare rappresenta rigidezze costanti a tratti.
Il comportamento è non lineare ma elastico. Questo vuol dire che il l’elemento multilineare è un elemento elastico la cui curva è n-lineare e la stessa curva viene seguita in fase di carico e in fase di scarico senza avere isteresi.
Proprietà di un elemento multilineare plastico
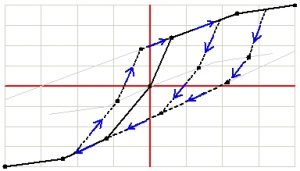
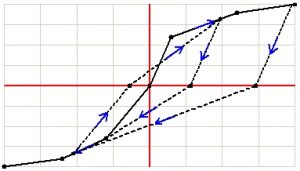
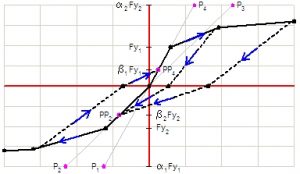
La relazione Forza-Deformazione è data da una curva n-lineare elastica. La curva n-lineare rappresenta rigidezze costanti a tratti. La curva in fase di scarico deriva da quelle di carico secondo tre diversi modelli isteretici: Takeda, Pivot o ad incrudimento cinematico.
Nelle figure seguenti sono riportati i diversi percorsi di scarico seguiti (Incrudimento cinematico, Takeda, Pivot)
Proprietà di un isolatore ad attrito – Friction Pendulum isolator
Questo è un isolatore biassiale ad attrito che accoppia le proprietà di attrito per le due deformazioni a taglio. Le deformazioni a taglio avvengono con le ipotesi di slittamento su una superficie. Questo elemento accoppia anche funzione di Gap assiale (ovvero è incapace di resistere a trazione) ed è resistente a momento nelle 2 direzioni. In pratica si usa per modellare il comportamento dei classici dispositivi di appoggio (dispositivi a piatti in acciaio lucidati o trattati con teflon).

Il modello di attrito è basato sul comportamento isteretico proposto da Wen (1976), e Park, Wen ed Ang (1986) e suggerito per analisi in occasione di isolamento alla base Nagarajaiah, Reinhorn e Constantinou (1991). Il comportamento del pendolo è come quello proposto da Zayas e da Low (1990).
Un valore pari a zero del raggio indica una superficie di scorrimento piatta e la corrispondente azione di taglio risulta nulla.
Se la superficie di slittamento è concava, il dispositivo oltre a garantire uno slittamento e un comportamento isteretico prodotto dall’attrito ha la duplice funzione di ricentraggio, ovvero, la capacità di tornare nella posizione iniziale successivamente all’azione sismica.
Proprietà di un isolatore plastico biassiale
Questo è un isolatore isteretico biassiale che accoppia le proprietà di plasticità deformazioni a taglio e le proprietà lineari di rigidezza efficace per le quattro deformazioni restanti. Il modello di plasticità è basato sul comportamento isteretico proposto da Wen (1976) e Park, Wen ed Ang (1986) e suggerito per l’isolamento alla base trattato da Nagarajaiah, da Reinhorn e da Constantinou (1991). Si veda la Figura 4.
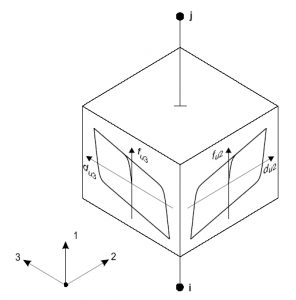
Questo elemento viene utilizzato per riprodurre il comportamento di dispositivi di isolamento commerciali noti come HDRB (High Damping Rubber Isolator), dove le proprietà isteretiche sono affidate ad una matrice elastomerici che contiene delle piastre di acciaio con funzione di armatura.
Il metodo FNA
Il metodo FNA (Fast Nonlinear Analysis, Ibrahimbegovic and Wilson, 1989; Wilson, 1993) è un metodo di integrazione al passo. Tale metodo è applicabile qualora gli effetti inelastici della struttura siano applicati in punti discreti del modello.
L’equazioni di equilibrio dinamico sono rappresentate da:
[3] ![]()
Dove KL è la matrice di rigidezza degli elementi lineari (tutti gli elementi escluso gli elementi denominati NLLINK); C è la matrice di smorzamento; M la matrice delle masse, rN il vettore delle forze dei gradi di libertà degli elementi non lineari;sono relativamente lo spostamento, la velocità e l’accelerazione relativa con il suolo; r è il vettore delle forze applicate.
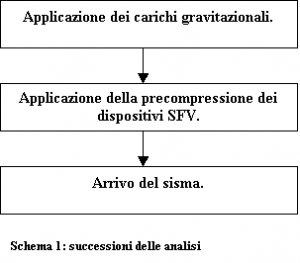
Una FNA può avere come condizioni iniziali la struttura indeformata, oppure, uno stato deformato a seguito di una analisi FNA precedente. Allo scopo di analizzare le strutture isolate o dotate di dispositivi di dissipazione supplementare di energia vengono definite diverse analisi FNA sequenziali che rispettano la successione indicata nello schema 1.
Con l’utilizzo di questo metodo ad ogni passo della analisi non viene aggiornata la matrice di rigidezza, ma viene aggiornato il vettore delle forze non lineari che rappresenta la variazione di rigidezza degli NLLINK presenti. Questo “escamotage” consente di risparmiare notevolmente il tempo di analisi e semplificare la scelta dei parametri.
Questo metodo è anche detto “Time history di tipo modale” in quanto utilizza una analisi modale per la determinazione della matrice di rigidezza iniziale e la “forma” del vettore delle componenti non lineari.
Dispositivi SFV
Il dispositivo fluido viscoso a cui viene fatto riferimento nel presente articolo, altresì mostrato in forma schematica in Figura 5, ha capacità dissipative basate sul refluimento di un particolare fluido comprimibile all’interno di un serbatoio di forma geometrica compatta, caratterizzato da un’alta stabilità ciclica e da un’alta capacità di carico esso ha un comportamento dinamico di questo dispositivo è ben rappresentabile attraverso un classico modello Kelvin – Voigt, costituito da un sistema in parallelo di una molla elastica e di un dissipatore.

Il comportamento elastico è rappresentabile attraverso una bilatera caratterizzata da dei valori di rigidezza K1, K2, rispettivamente al di sotto ed al di sopra della soglia di precarico imposta al materiale in fase costruttiva.
Tali dispositivi vengono posizionati nella struttura in elevazione, all’interno di controventi tradizionali, con lo scopo di incrementare la dissipazione strutturale, oppure vengono inseriti alla base della struttura, nel piano di scivolamento, con lo scopo di accoppiamento a sistemi di isolamento sismico.
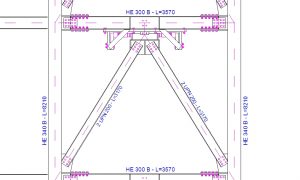
Figura 6: esempio di inserimento di un dispositivo SFV in un controvento a K di una struttura multipiano in acciaio
La modellazione dei dispositivi siliconici fluido-viscosi
Per riprodurre il comportamento dei dispositivi siliconici è stato necessario ricorrere all’utilizzo di quattro elementi non lineari, posizionati in parallelo, presenti nella libreria del codice di calcolo SAP2000.
-Elemento 1 – Damper: per la fase viscosa.
-Elemento 2 – Gap: per simulare il fine corsa (in compressione).
-Elemento 3 – Hook: per simulare il fine corsa (in trazione).
-Elemento 4 – Kml: è la componente elastica bilatera.
La corrispondenza numerica di questo modello FEM con i dispositivi è stata accertata mediante una estesa campagna di riproduzione in forma numerica di prove sperimentali.
Esempio di comportamento del sistema assemblato
Sottoponendo l’assemblato sopra descritto ad una forzante armonica si ottiene la seguente risposta (fe: componente elastica, fc componente viscosa). Il plottaggio è stato fatto componendo le due diverse fasi: quella elastica e quella viscosa.
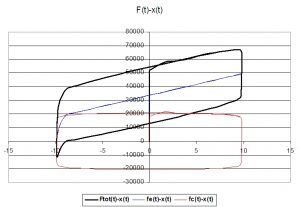
L’area racchiusa nella curva, rappresenta l’energia dissipata ad ogni ciclo.
BIBLIOGRAFIA
Bandini, L., Fani, A., Tesi, Università degli Studi di Firenze, “Modellazione e progettazione ottimale di dispositivi ADAS e siliconici in controventi dissipativi di strutture in acciaio”.
Terenzi, G., Tesi di Dottorato, Università degli Studi di Roma,“Effetti dissipativi nell’isolamento sismico”.
Sorace, S., Terenzi. G., “Design assessment of fluid viscous dampers for base-isolation systems”, submitted for publication in the ASCE Journal of Structural Engineering, January 2000.
Scheller, J., Constantinou, M.C., Response History Analysis of Structures with Seismic Isolation and Energy Dissipation Systems: Verification Examples for Program SAP2000 – MCEER-99-0002.
Wilson, E.L., “Three dimensional static and dynamic analysis of structures”, Csi – Computer and Structures, Inc, Berkeley California USA.
AA.VV., “CSi Analysis References Manual for SAP2000, ETABS and SAFE” , Csi – Computer and Structures, Inc, Berkeley California USA.